专利摘要显示,本申请提供一种车辆巡航控制方法、系统、介质、电子设备及车机。所述车辆巡航控制方法包括:根据车辆的预设速度和自车速度计算获得速度偏差;根据所述速度偏差所在的速度偏差分区,选择可变控制参数,对请求加速度进行分段控制;其中,所述速度偏差分区是根据速度偏差大小划分的分区,包括负向偏大区、负向偏小区、正向偏小区和正向偏大区;根据所述可变控制参数和所述速度偏差计算获得车辆定速巡航的PID控制量。本申请能够提高定速巡航的控制精度,减少控制过程中产生的速度波动。
本文源自金融界
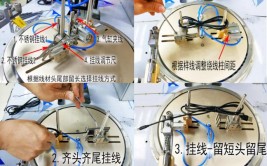
 汽修知识")
(图片来自网络侵删)